在刚刚圆满落幕的 NVIDIA GTC 2026 大会上,全场最引人注目的时刻并非单纯的显卡算力发布,而是当 NVIDIA 首席执行官黄仁勋与迪士尼研究中心(Disney Research)共同展示的那只身高不足一米的"雪宝"(Olaf)机器人。
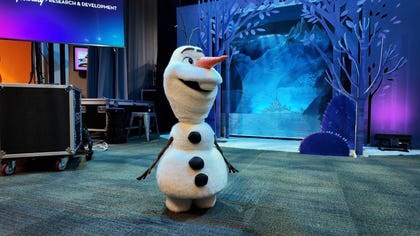
这不单是一个迪士尼角色的复刻,它标志着物理 AI(Physical AI)已经跨越了从"实验室演示"到"复杂非线性环境应用"的鸿沟。本文将深入拆解雪宝机器人背后的四大核心技术支柱,揭示这一"活生生"的数字化生命是如何在现实世界中实现其标志性动作与智能交互的。
一、数字化胎动:Newton 与 Kamino 仿真引擎的协同
要让雪宝实现电影中那种"摇摇晃晃但永不摔倒"的拟人化步态,传统的动力学建模(Model-Based Control)几乎无法胜任。雪宝的诞生,始于 NVIDIA 与迪士尼联合研发的两个核心仿真平台:Newton 与 Kamino。
1. Newton 物理引擎:非线性动力学的极致
Newton 是 GTC 2026 发布的开源物理引擎,专为 GPU 大规模并行计算设计。与以往的物理引擎不同,Newton 针对软体碰撞和非稳态支撑面进行了深度优化:
- Warp 框架支持:利用 NVIDIA Warp 框架,Newton 能够以微分的方式处理碰撞。这意味着机器人在模拟器中跌倒时,系统可以计算出"如何调整关节扭矩才能避免下次跌倒"的精确梯度。
- 多材质仿真:雪宝的外壳不仅有坚硬的结构件,还有模拟积雪的软性覆盖层。Newton 能够实时计算软材料在受压时的形变,这对于雪宝在模拟"拥抱"或"碰撞"时的反馈至关重要。
2. Kamino 模拟器:时空加速器
如果说 Newton 是物理法则,那么 Kamino 就是雪宝的"训练场"。在 Kamino 中,研发团队同时运行了 10,000 个雪宝副本。
- 海事环境模拟:由于雪宝的首个应用场景是迪士尼游轮的"阿伦黛尔庆典",Kamino 模拟了极高频率的六自由度摇摆平台(模拟海浪晃动)。
- 1:1000 的时间加速:通过 GPU 加速,雪宝在虚拟世界中经历的一小时,相当于人类现实世界中一年的训练量。

二、灵魂的训练:艺术导向的强化学习 (Art-Driven RL)
雪宝最让人惊叹的是它那种带有"动画感"的动作。这并非由程序员手写代码实现,而是通过生成式强化学习(Generative RL)习得的。
1. 运动捕捉与艺术意图的对齐
迪士尼的顶尖动画师将《冰雪奇缘》电影中的原始动画序列输入系统。技术团队使用了一个复杂的奖励函数(Reward Function),其公式简化表达为:
1 | R = α·S + β·A - γ·E |
其中:
- S 代表稳定性奖励(不摔倒)
- A 代表艺术拟合度奖励(动作与动画原稿的相似度)
- E 代表能效惩罚(避免电机过度震荡)
通过这种方式,雪宝不仅学会了走路,还学会了如何像电影里那样"挺着肚子、甩着树枝手"走路。

2. Sim-to-Real:跨越数字鸿沟
为了解决模拟器与现实环境的误差,团队采用了域随机化(Domain Randomization)。在 Kamino 中,雪宝脚下的摩擦力、关节的阻力、甚至自身的重心位置,每一毫秒都在发生随机偏移。这种"魔鬼训练"使得雪宝在面对现实中不平整的石子路或湿滑的甲板时,表现得极其稳健。
三、硬件心脏:NVIDIA Jetson AGX Thor
雪宝纤细的躯干内藏着一颗极其强大的心脏——NVIDIA Jetson AGX Thor。这是专为人形/仿生机器人设计的下一代 SoC。
1. 超越算力的端侧推理
Jetson AGX Thor 基于最新的 Blackwell 架构,拥有超过 800 TFLOPS 的 AI 性能。这使得雪宝能够本地运行:
- 实时路径规划:在 20 毫秒内预测未来 3 步的落脚点
- 多模态感知:同时处理来自激光雷达、深度相机和触觉阵列的海量数据
2. 自我热管理与执行器
雪宝的躯体非常狭小,散热是巨大挑战。Jetson 平台集成了智能功率管理系统。当雪宝检测到内部温度过高时,它会利用 Isaac Lab 预训练的"降温步态",通过减少不必要的肢体晃动来降低功耗,甚至在对话中加入"我觉得有点热,需要冷静一下"的人设对白,优雅地执行降压操作。
四、认知与交互:Isaac GR00T N2 基础模型
雪宝之所以能与黄仁勋流利对话,甚至在听到笑话时做出夸张的反应,是因为它接入了 Isaac GR00T N2——专为机器人设计的通用基础模型。
1. 语义与动作的映射
当游客说"雪宝,给我一个拥抱"时,GR00T 模型不仅理解了语言含义,还将其转化为一系列复杂的全身协调动作(Whole-Body Control)。它会识别游客的身高,自动调整手臂张开的角度,并确保在接触过程中不会因为力度过大而推倒对方。
2. 角色一致性(Persona Alignment)
通过检索增强生成(RAG)技术,雪宝的所有回答都被限制在迪士尼设定的语库内。它知道自己是一个喜欢夏天的雪人,拥有天真无邪的世界观。这种基于大语言模型(LLM)的实时角色扮演,让雪宝从"机器"升华为"角色"。
五、物理 AI 的未来:从雪宝看机器人产业
雪宝机器人的成功实现,预示着机器人开发进入了"通才时代":
- 数据即动力:未来机器人不再需要繁琐的手工编程,而是通过模拟器中的大规模数据训练
- 跨界融合:电影工业的审美与硅谷的算力深度融合,机器人将不再是冷冰冰的工业品,而是具有情感价值的伴侣
- 标准化平台:NVIDIA Isaac 平台与 OpenUSD 标准正在成为机器人领域的"Android",降低了开发者复刻复杂仿生动作的门槛
结语
雪宝在 GTC 2026 上的表演,不仅是技术实力的秀场,更是对未来生活的一种预演。当机器人能够像雪宝一样拥有灵活的肢体、幽默的灵魂和在复杂物理环境中的生存能力时,它们离走进千家万户就不远了。
从《冰雪奇缘》的银幕到 GTC 舞台的现实,雪宝证明了:物理 AI 不再是科幻,而是正在发生的革命。
参考链接:
- NVIDIA GTC 2026 官方发布
- Disney Research 机器人技术白皮书
- NVIDIA Isaac 平台文档